Research and Inventions
Papers
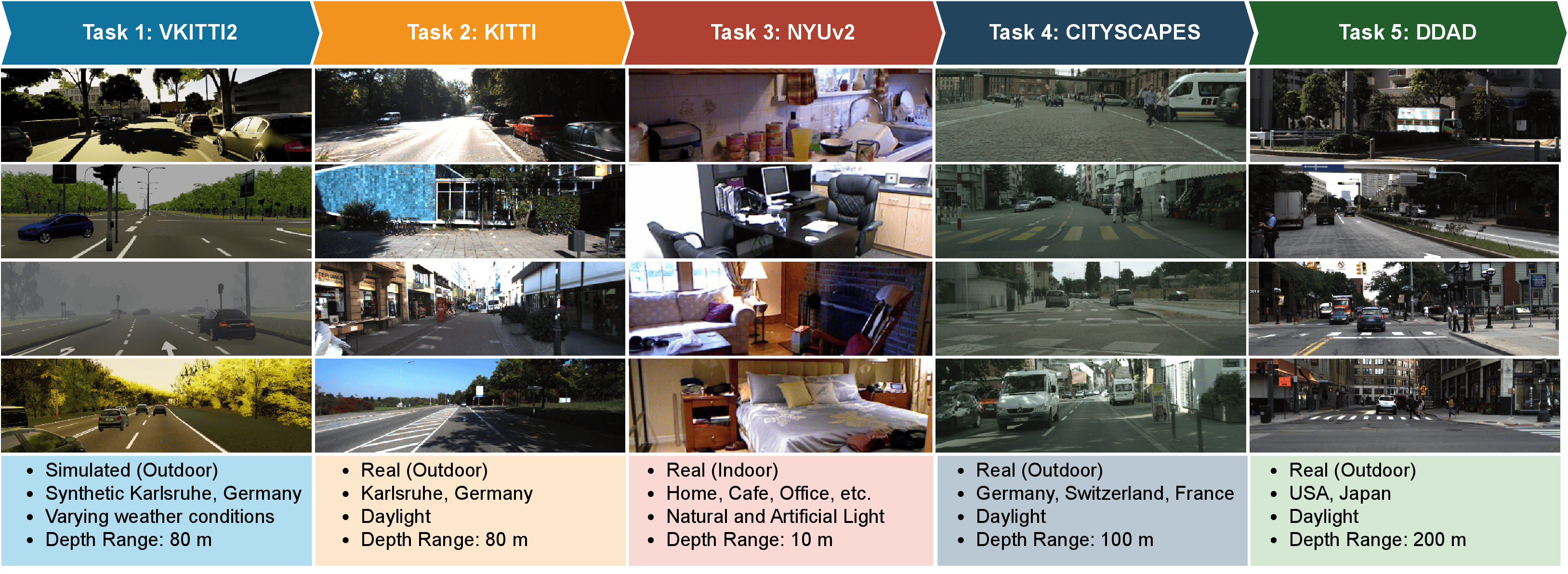
Continual Learning of Unsupervised Monocular Depth from Videos
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)
H Chawla, A Varma, E Arani, B Zonooz
[Arxiv][Code][Presentation]
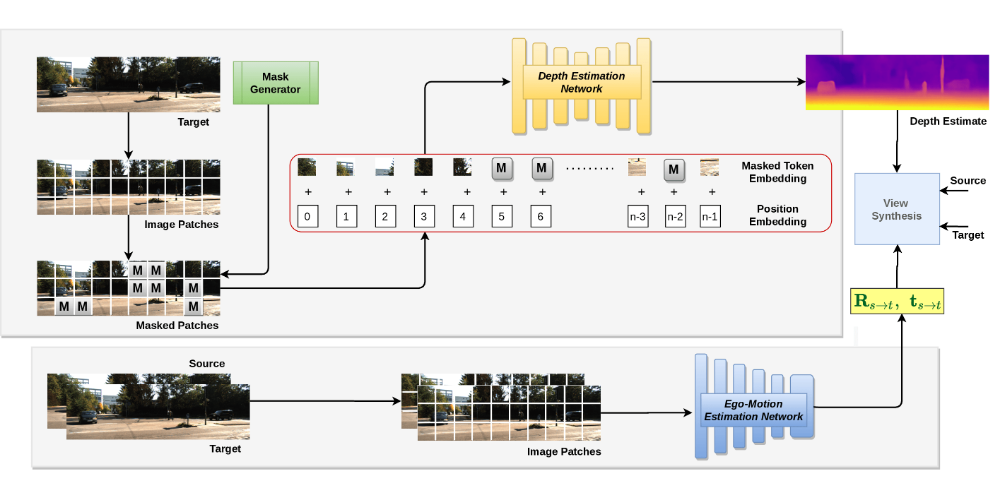
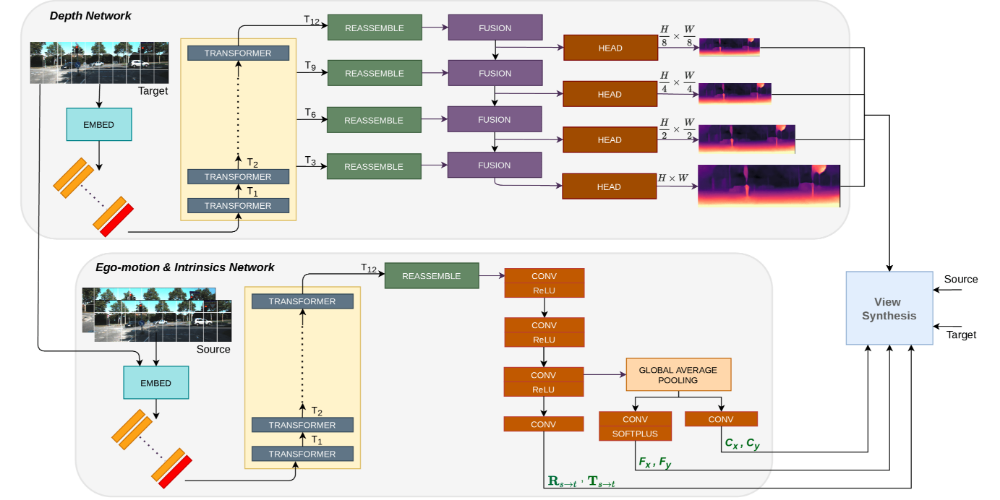
Transformers in Unsupervised Structure-from-Motion
Springer Communications in Computer and Information Science (CCIS)
H Chawla, A Varma, E Arani, B Zonooz
[Camera Ready][Code]
Image Masking for Robust Self-Supervised Monocular Depth Estimation
IEEE International Conference on Robotics and Automation (ICRA)
H Chawla, K Jeeveswaran, E Arani, B Zonooz
[Camera Ready][Arxiv][Code][Presentation]
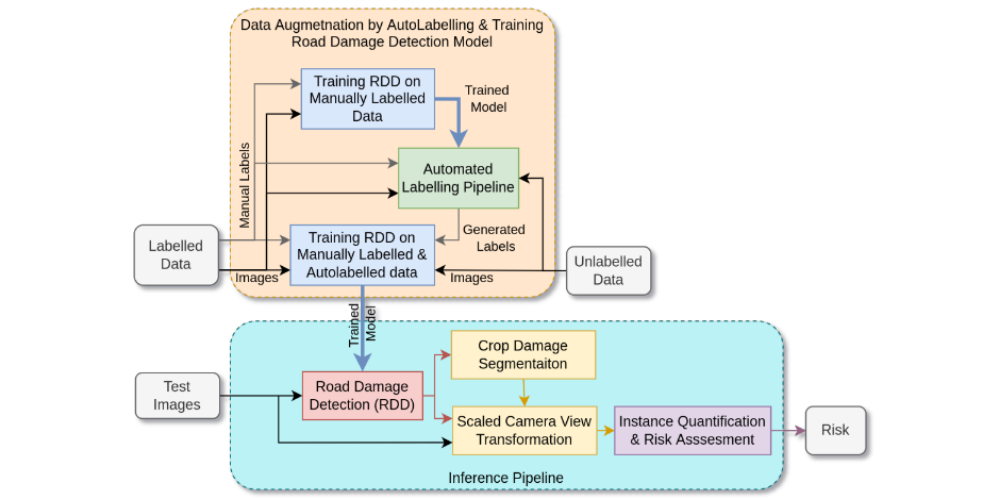
AI-Driven Road Maintenance Inspection v2: Reducing Data Dependency & Quantifying Road Damage
International Road Federation (IRF) Global Roads to Tomorrow (R2T) Conference
H Iqbal, H Chawla, A Varma, T Brouns, A Badar, E Arani, B Zonooz
[Arxiv]
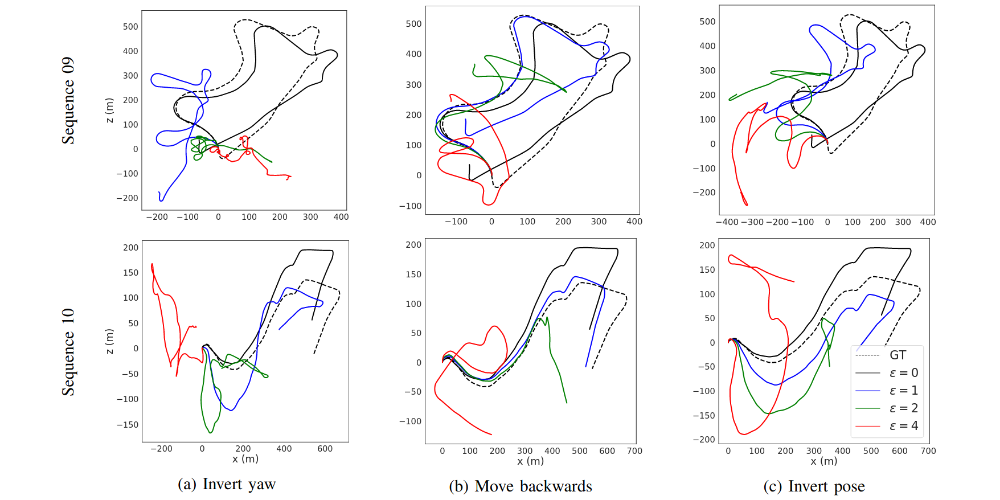
Adversarial attacks on monocular pose estimation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
H Chawla, A Varma, E Arani, B Zonooz
[Camera Ready][Arxiv][Code][Presentation]
Transformers in Self-Supervised Monocular Depth Estimation with Unknown Camera Intrinsics
International Conference on Computer Vision Theory and Applications (VISAPP)
A Varma, H Chawla, B Zonooz, E Arani
[Camera Ready][Arxiv][Code][Presentation]
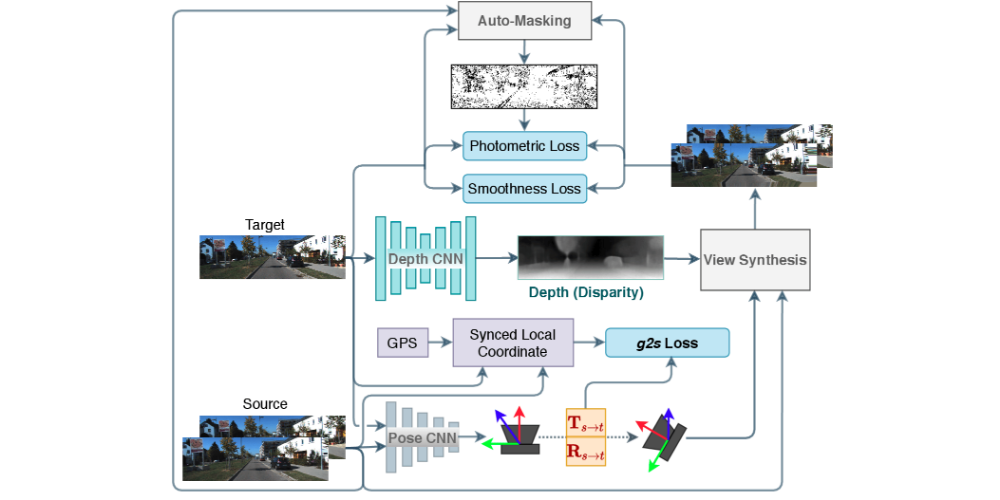
Multimodal Scale Consistency and Awareness for Monocular Self-Supervised Depth Estimation
IEEE International Conference on Robotics and Automation (ICRA)
H Chawla, A Varma, S Marzban, E Arani, B Zonooz
[Camera Ready][Supplementary video][Arxiv][Code][Presentation]
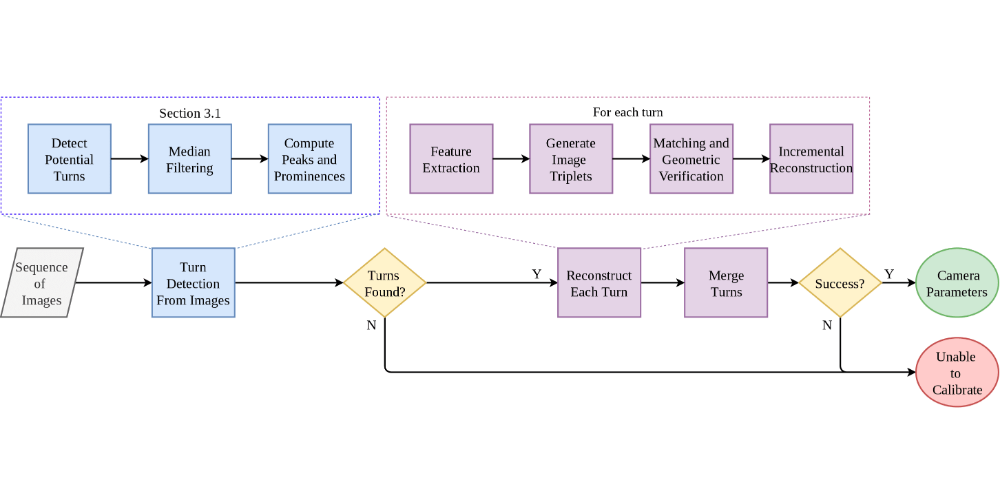
Practical Auto-Calibration for Spatial Scene-Understanding from Crowdsourced Dashcamera Videos
International Conference on Computer Vision Theory and Applications (VISAPP)
H Chawla, M Jukola, S Marzban, E Arani, B Zonooz
[Camera Ready][Arxiv][Presentation]
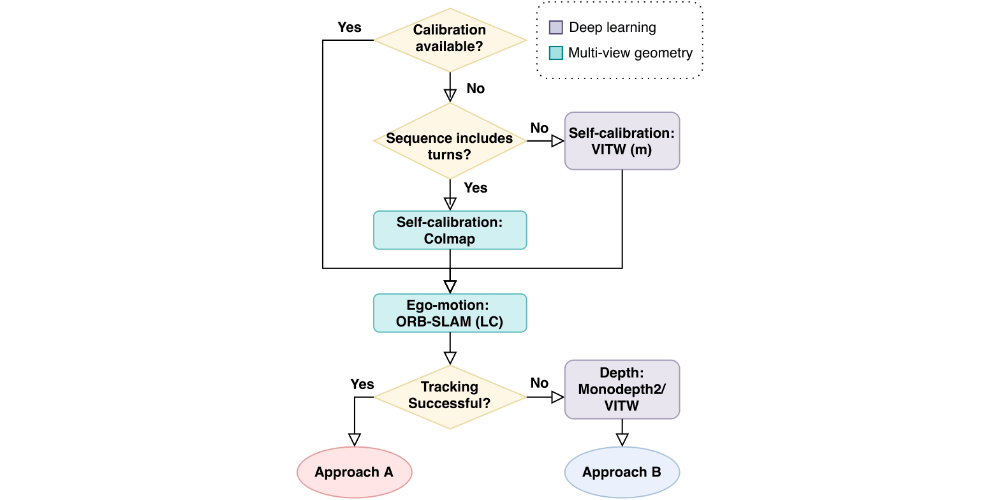
Crowdsourced 3D Mapping: A Combined Multi-View Geometry and Self-Supervised Learning Approach
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
H Chawla, M Jukola, T. Brouns, E Arani, B Zonooz
[Camera Ready][Arxiv][Presentation]
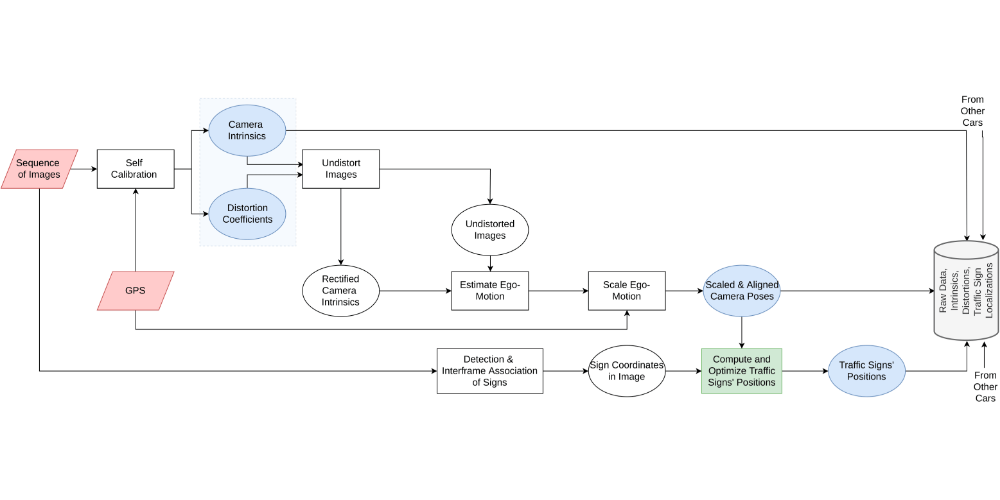
Monocular Vision based Crowdsourced 3D Traffic Sign Positioning with Unknown Camera Intrinsics and Distortion Coefficients
IEEE International Conference on Intelligent Transportation Systems (ITSC)
H Chawla, M Jukola, E Arani, B Zonooz
[Camera Ready][Arxiv][Presentation]
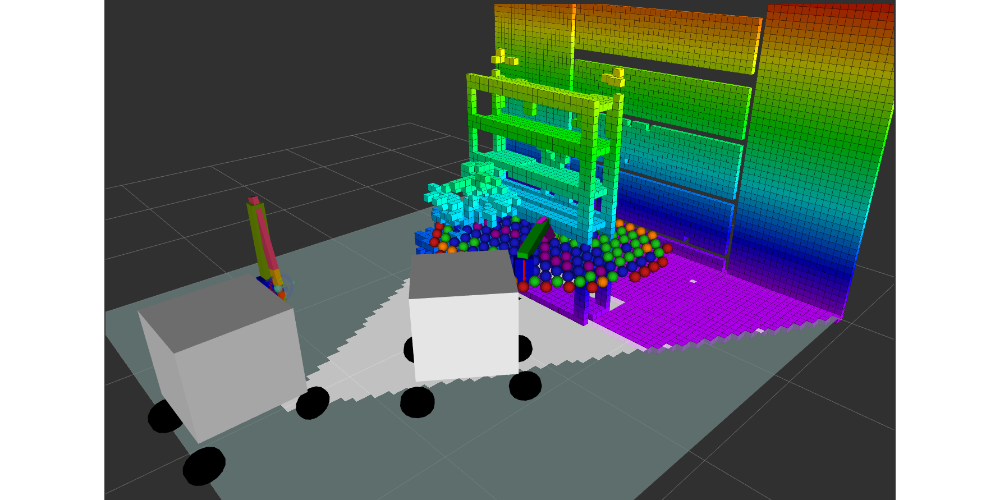
Robot Placement for Mobile Manipulation in Domestic Environments
Delft University of Technology (TU Delft)
H Chawla
[Video][Thesis][Code]
Patents
System and method for 3D localization of landmarks from real-world images
H Chawla, M Jukola, T. Brouns, E Arani, B Zonooz
Published: CN113570662; EP3905198; US2021342589
Granted: NL2025452
Computer-implemented method to improve scale consistency and/or scale awareness in a model of self-supervised depth and ego-motion prediction neural networks
H Chawla, A Varma, E Arani, B Zonooz
Published: CN114494331; EP4002215; US2022156882
Method of self-supervised learning in neural network for robust and unified estimation of monocular camera ego-motion and intrinsics
A Varma, H Chawla, B Zonooz, E Arani
Pending
See more at Google Scholar, and Google Patents